Table of Contents >> Show >> Hide
- What Are Self-Synchronizing, Air-Flopping Limbs?
- Why This Soft Robot Feels Like a Big Deal
- How It Hops, Walks, and Swims
- The Bigger Idea: Embodied Intelligence
- Why Soft Robotics Keeps Borrowing From Biology
- Real-World Uses: Where Could This Go?
- What This Means for the Future of Robot Design
- Experiences Related to the Topic: Why This Research Feels So Memorable
- Conclusion
- SEO Tags
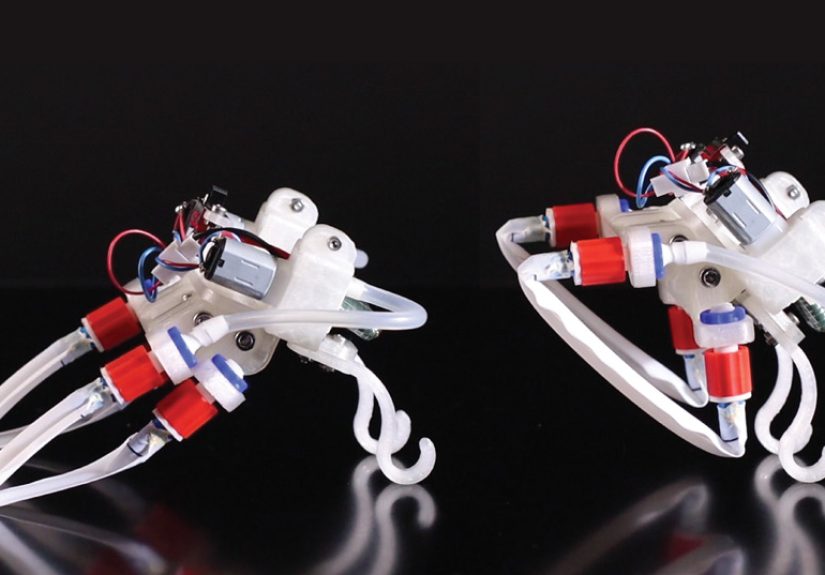
Some robots need code, sensors, processors, and enough electronic drama to make a server rack sweat. This one? Not so much. The star of this story is a soft robot whose limbs flap, synchronize, hop, and swim using little more than air pressure, elastic materials, and the laws of physics doing a very impressive group project. It looks a bit like an inflatable tube dancer decided to major in engineering, and honestly, that is part of the charm.
Behind the delightful weirdness is a serious breakthrough in soft robotics. Researchers created a robot with self-synchronizing limbs that coordinate their motion without a conventional brain, onboard computer, or complicated control system. Instead of commanding every movement from the top down, the robot relies on what scientists often call embodied intelligence: the body itself, plus its interaction with the environment, helps create the behavior. In plain English, the legs do a surprising amount of the thinking.
That matters because robotics has long wrestled with a basic problem. The more complex the terrain, the more difficult it becomes to control a robot gracefully. Rocks, bumps, slick floors, puddles, and changing surfaces are bad news for machines that depend on perfectly timed commands. But a robot that can adapt through its materials, structure, and physical coupling may need less micromanagement. That opens the door to smaller, simpler, cheaper, and more resilient systems that can move through messy real-world spaces without requiring a digital nervous breakdown every five seconds.
What Are Self-Synchronizing, Air-Flopping Limbs?
At the heart of this hopping-and-swimming robot are soft limbs made from tubes that oscillate when supplied with a constant flow of air. That alone is fascinating. Rather than needing a separate command for each step, the limbs naturally enter rhythmic motion because of their shape, elasticity, airflow, and contact with the ground or water. In other words, motion emerges from the setup itself.
The phrase self-synchronizing limbs means multiple limbs can fall into coordinated patterns without a central controller barking orders like a frantic dance instructor. They synchronize through physical interactions. Some of that coupling happens internally through airflow and the structure of the robot. Some of it happens externally because the robot pushes on the environment, and the environment pushes back. The result is a gait that is not pre-scripted line by line but instead settles into a pattern because that pattern works.
This is one reason the robot is so compelling. Traditional robots often treat the body as hardware and the controller as the brains. Soft robotics flips that relationship on its head. Here, the body is not just hardware. It is part of the computation. It helps generate timing, coordination, and adaptation all by itself. That is not magic. It is mechanics with excellent timing.
Why This Soft Robot Feels Like a Big Deal
It moves without the usual robotic baggage
Many robots depend on sensors, processors, actuators, feedback loops, batteries, and plenty of software tuning. That approach works, but it can also make machines bulky, power-hungry, and fragile in unpredictable environments. A soft, air-powered robot that can coordinate its own motion using physics trims that overhead dramatically.
That simplicity is a feature, not a bug. Fewer hard components can mean lower weight, lower cost, easier manufacturing, and less vulnerability to impact. Soft systems also tend to handle contact more gracefully than rigid robots. If a rigid machine meets a wall, things get tense. If a soft robot meets a wall, it often just squishes, redirects, and keeps going like a determined marshmallow.
It is fast in a way that surprises people
One of the standout findings in this line of research is speed. The limbs can oscillate at very high frequencies, and the synchronized robot can move far faster than people usually expect from soft machines. Soft robots are often stereotyped as slow, gentle, and a little floppy. This work challenges that assumption. Here, softness is not a weakness. It becomes part of a rapid, efficient locomotion strategy.
It transitions between environments
Perhaps the coolest part is that the same basic physical principles can support multimodal locomotion. The robot does not just move on land. It can also swim. That amphibious behavior is important because crossing from one environment to another is notoriously difficult in robotics. Land and water have very different demands. A robot that can handle both without a heavy computational stack is the kind of thing that makes engineers lean forward in their chairs.
How It Hops, Walks, and Swims
On land, the oscillating limbs strike the surface in a repeating rhythm. When those rhythms lock together in a useful pattern, the robot can generate forward motion, hopping, or rapid stepping. Because the motion emerges through physical synchronization, the gait is not fixed in a brittle way. If the robot encounters a disturbance, its limbs can often fall back into sync as the body and environment continue interacting.
In water, the story changes but the principle survives. The same soft flopping that looks almost comical on land becomes propulsion in a fluid environment. Instead of pressing against the ground, the limbs push against water. The medium is different, but the body still turns rhythmic oscillation into movement. That is a big reason this research is so exciting: the robot does not need an entirely different mechanical philosophy every time the setting changes.
The amphibious transition is especially interesting because it shows how physical intelligence can create adaptive behavior. Rather than treating each terrain as a separate software problem, the robot exploits the fact that bodies and environments naturally interact in patterned ways. This is closer to how many animals move. Nature often does not solve locomotion by calculating everything from scratch. It uses structure, elasticity, timing, and feedback from the world.
The Bigger Idea: Embodied Intelligence
If this robot seems clever despite having no obvious brain, that is because the cleverness is distributed differently. In modern robotics, people increasingly talk about embodied intelligence or morphological computation. The idea is simple: intelligence does not live only in software. Sometimes the shape of the body, the material properties, and the interaction with the environment do part of the problem-solving.
Think about a running shoe. It has no processor, yet its shape and material help manage impact, guide motion, and store and release energy. A spring-loaded pogo stick does something similar. It does not need to “decide” to rebound; it rebounds because of how it is built. Soft robots extend that logic much further. Their compliance, geometry, and internal fluidic behavior can help them adapt, coordinate, and even appear almost strategic.
This is not the first time researchers have moved in that direction. Soft robotic ring oscillators, soft digital logic, pneumatic actuation systems, and bio-inspired locomotion platforms have all pushed toward machines that do more with less centralized control. What makes the self-synchronizing limb robot special is how vividly it demonstrates the concept. Watching it move makes the theory easier to understand. You do not need a lecture on embodied intelligence when the legs are already giving the presentation.
Why Soft Robotics Keeps Borrowing From Biology
Animals are annoyingly good at locomotion. A frog hops. A fish swims. An octopus handles chaos like it has a private deal with physics. Even insects with tiny nervous systems can produce astonishingly robust movement. Engineers study these systems not to copy them perfectly, but to borrow principles that work.
One major lesson from biology is that movement is not controlled by the brain alone. Tendons store energy. Limbs swing passively. Body shape changes how forces move through the animal. Contact with the environment helps stabilize behavior. In many cases, the body is doing as much as the nervous system, sometimes more. That is why roboticists care about compliant materials, elastic energy storage, distributed control, and local feedback.
The air-flopping limb robot fits neatly into that tradition. It does not imitate one animal exactly, but it borrows a biological strategy: let the body and the environment share the work. That makes the machine more adaptive and less dependent on constant top-down supervision. It is a little less “robot executing instructions” and a little more “system finding a rhythm that works.”
Real-World Uses: Where Could This Go?
No, your next houseguest probably will not be a squad of inflatable frog-bots doing laps in your bathtub. But the applications are real. Soft robots that can navigate unpredictable spaces could be useful in inspection, environmental monitoring, medical technology, and search tasks in confined or delicate settings.
For instance, small air-powered robots may someday help move through pipes, rubble, narrow channels, or fluid-filled spaces where rigid robots struggle. In medicine, soft-bodied machines are appealing because they can interact more gently with tissues. In environmental work, amphibious soft robots could explore wetlands, shorelines, or other mixed terrains. In extreme environments, simple robots with fewer hard electronic parts may also offer advantages where durability and adaptability matter more than perfect precision.
There is also a scaling story here. The underlying idea of physical synchronization may prove useful across different sizes, from tiny systems to larger field robots. Researchers are especially interested in designs that keep working when the surroundings are uncertain. A robot that can exploit physical dynamics instead of fighting them has a better shot at surviving outside a spotless lab floor.
What This Means for the Future of Robot Design
For years, the default assumption in robotics was that better behavior required more sensing, more processing, and more sophisticated control. Sometimes that is true. But this research is a strong reminder that another path exists. You can also build better behavior into the body.
That shift could matter a lot. It suggests the next generation of robots may not be defined only by smarter software, but by smarter materials and smarter mechanical design. Instead of over-controlling every motion, engineers may increasingly create machines that naturally settle into useful behaviors. That approach can improve energy efficiency, reduce control complexity, and increase resilience in the face of noise, impact, and changing terrain.
It also changes how we think about autonomy. A robot does not need to look like a tiny person with a digital brain to act in an autonomous way. Sometimes autonomy emerges when structure, motion, and environment line up just right. That is exactly what makes this hopping, swimming, self-synchronizing machine so memorable. It reminds us that intelligence can be soft, physical, and a little delightfully ridiculous.
Experiences Related to the Topic: Why This Research Feels So Memorable
One reason this topic sticks with people is that the experience of seeing a soft robot move is very different from watching a traditional machine. A metal robot often impresses you with precision. A soft robot impresses you with behavior. It wiggles, buckles, rebounds, and somehow turns what looks like chaos into motion that makes sense. The first reaction is usually laughter, followed quickly by, “Wait, how is that actually working?” That combination of surprise and curiosity is a powerful thing.
For students, hobbyists, and researchers, the experience of working around pneumatic soft systems is often a lesson in humility. You start by assuming the controller will dominate everything. Then you realize materials, pressure, friction, and timing are quietly making major decisions behind the scenes. A tiny change in tubing, stiffness, or surface contact can alter the entire gait. That can be frustrating in the moment, but it also teaches a bigger lesson: locomotion is not just a software problem. It is a body problem, an environment problem, and a timing problem all at once.
There is also something strangely relatable about a robot that succeeds by being flexible instead of rigid. Anyone who has ever tried to walk across wet tile, uneven grass, or a rocky shoreline knows that brute force is not the answer. You adapt. You shift your weight. You let the surface tell you how to move. Soft robots capture a little of that experience. They do not overpower the world as much as negotiate with it.
In educational settings, robots like this are gold. They give people a concrete way to understand concepts such as resonance, feedback, compliance, and embodied intelligence without turning the room into a graduate seminar hostage situation. You can literally point to the limbs and say, “That flopping is part of the control system.” Suddenly a very abstract idea becomes visual, physical, and memorable.
For engineers, the experience is equally valuable because it challenges a deep habit in design culture. Many of us are trained to eliminate messiness. We want stable equations, predictable inputs, and neatly separated components. Soft robotics asks for a different mindset. It asks designers to work with instability, nonlinearity, and material behavior instead of trying to erase them. That shift can feel uncomfortable at first, but it is also where some of the most exciting ideas live.
And then there is the plain emotional response. A robot that hops and swims using self-synchronizing, air-powered limbs is just fun. Not fake-fun, marketing-deck fun. Real fun. The kind that makes serious scientists grin when a prototype suddenly works better than expected. The kind that reminds people why they got interested in robotics in the first place. The machine looks playful, but the implications are substantial. It hints at a future where robots are more adaptive, more accessible, and more physically clever than we assumed.
That is why this topic lands so well with readers. It delivers the rare combination of novelty, scientific depth, and visual delight. You get a genuine advance in locomotion research, a fresh example of embodied intelligence, and a robot that looks like it belongs in a science lab run by very ambitious pool noodles. That is hard to forget, and even harder not to love.
Conclusion
Behold self-synchronizing, air-flopping limbs that hop and swim is more than a catchy science headline. It points to a real change in how robotics can be designed. By using soft materials, airflow, and physical coupling to generate coordinated motion, researchers have shown that complex locomotion does not always require complex control. Sometimes the smartest move is to let the body do more of the work.
That idea could shape the future of air-powered soft robots, amphibious robots, and machines built for uncertain environments. It may also make robotics more elegant. When movement emerges from physics instead of being over-managed by software, the result can be faster, simpler, and surprisingly robust. Plus, let us be honest, it is a lot more entertaining to watch.